Displaying items by tag: AI
Predictive Maintenance using Machine Learning
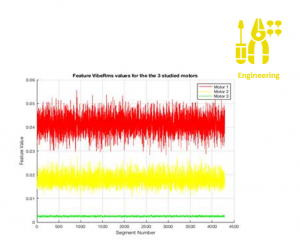
This use case summarizes findings of a health monitoring study using empirical vibration and temperature data to build a predictive maintenance model. Sensors are placed in four different positions on the housing surface of three running motors at different health stages to study the model performance and its robustness with respect to sensor mounting and various operating conditions. Tens of thousands of data segments were processed and used to extract features and build supervised and unsupervised classification algorithms. A feed forward Neural Network was deployed to classify signals (unseen before by the network) from these 3 motors. Preliminary results look promising with 99.2 % classification accuracy. It is also worth to note the algorithm robustness with respect to sensor mounting.