Displaying items by tag: Machine Learning
Social Media Analytics for Sales Prediction

Social data analytics has recently gained esteem in predicting the future outcomes of important events like major political elections and box-office movie revenues. Related actions such as tweeting, liking, and commenting can provide valuable insights about consumer’s attention to a product or service. Such an information venue presents an interesting opportunity to harness data from various social media outlets and generate specific predictions for public acceptance and valuation of new products and brands. This new technology based on gauging consumer interest via the analysis of social media content provides a new and vital tool to the sales team to predict sales numbers with a great deal of accuracy.
Predictive Maintenance using Machine Learning
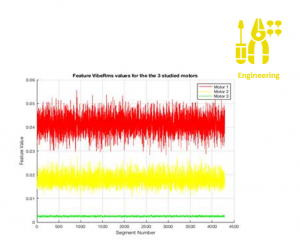
This use case summarizes findings of a health monitoring study using empirical vibration and temperature data to build a predictive maintenance model. Sensors are placed in four different positions on the housing surface of three running motors at different health stages to study the model performance and its robustness with respect to sensor mounting and various operating conditions. Tens of thousands of data segments were processed and used to extract features and build supervised and unsupervised classification algorithms. A feed forward Neural Network was deployed to classify signals (unseen before by the network) from these 3 motors. Preliminary results look promising with 99.2 % classification accuracy. It is also worth to note the algorithm robustness with respect to sensor mounting.